Система директорного управления воздушными средствами
Назначение
«СДУ» предназначена для формирования командных сигналов управления самолетом (вертолетом), для удержания ВС на заданной траектории полета и высоте при полете по маршруту, выполнении маневра захода на посадку на заданный аэродром (площадку специального назначения) в автономном режиме.
При совмещении с Системой раннего предупреждения приближения к земле (СРППЗ) - выполнение полета по оптимальной траектории обхода (огибания) препятствий или районов опасных явлений погоды.
Состав оборудования
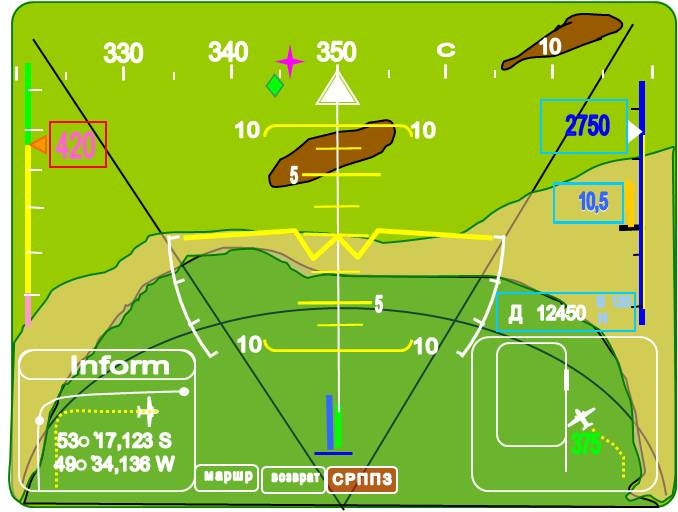
1. Пилотажный индикатор ДУ:
- цветной жидкокристаллический дисплей 100×120×70мм;
- модуль вычислителя;
- кнопочная панель;
2. Модуль GNSS (GPS) и антенна
Режимы управления ВС
Ручной, директорный, автоматический;
Режимы работы «ПИ»
«Маршрут», «возврат», «посадка», «повторный заход», «рельеф»;
Расчет полета по маршруту c заданием путевого или маршрутного способа:
- автоматическое и непрерывное указание местонахождения самолета в полярных и географических координатах;
- указание положения линии заданного пути (маршрута полета) и маневра ВС для выхода на нее по оптимальной траектории;
- сигнализация подхода и пролета заданного пункта маршрута;
- оперативный ввод данных вновь заданного пункта маршрута при изменении траектории полета (обход опасных явлений погоды и т.д.);
- обеспечение выхода самолета в точку начала снижения для захода на посадку по заданной траектории (начальный этап захода на посадку);
- сигнализация подхода к минимально безопасной высоте по этапам маршрута;
- расчет направления и скорости ветра (автоматический или по запросу);
- отображение текущей расчетной навигационной информации с учетом угла сноса;
- автономное определение пеленга на заданный аэродром (площадку);
- автономное определение высоты, путевой скорости и магнитного путевого угла при отказах бортовых систем при полете по маршруту;
- прогноз траекторий ВС и некоторых навигационных параметров при отсутствии сигналов GNSS.
Построение маневра захода на посадку:
- заход на посадку (повторный заход) по выбранной траектории;
- расчет траектории захода и снижения на посадочном курсе с учетом ветра;
- отображение маневра захода на посадку с указанием местоположения ВС;
- выбор типа глиссады снижения с учетом маневренных характеристик самолета;
- установка и сигнализация минимально безопасной высоты в районе аэродрома;
- отображение текущей расчетной навигационной информации, положения заданных линий курса, глиссады и текущей дальности до точки приземления;
- автономное определение высоты, путевой скорости и магнитного путевого угла при отказах бортовых систем при заходе на посадку;
- прогноз дальности до точки приземления при отсутствии сигналов GNSS;
- обнаружение преждевременного снижения по глиссаде в процессе конечного этапа захода на посадку (режим PDA) и предупреждение об этом экипажа в соответствии с требованиями TSO‑C151a.
Сопряжение с системой раннего предупреждения приближения к земле:
- Формирование команд директорного управления ВС при обходе (огибании) рельефа местности по наиваыгоднейшей траектории;
- предупреждение столкновений с препятствиями - расчет оптимальной траектории обхода (огибания) препятствий при срабатывании предупредительной сигнализации «Впереди земля» («Terrain Ahead») или «Впереди препятствие» («Obstacle Ahead»);
- сигнализация о предельных значениях крена «Крен велик» («Bank limit»);
- информация базы данных Jeppesen СРППЗ.
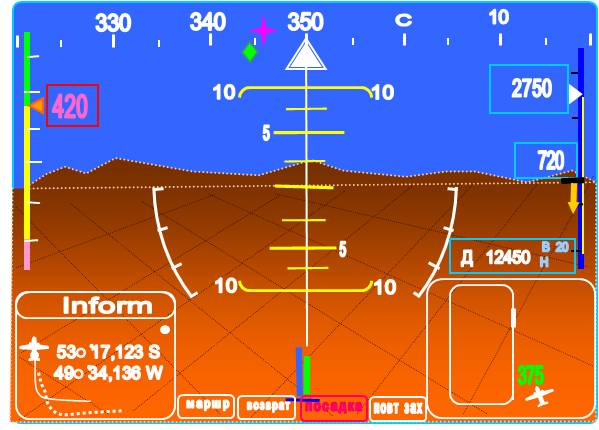
Малогабаритный жидкокристаллический цветной дисплей:
.jpg)
- диагональ 5”;
- разрешение 640х480;
- 256 цветов;
«СДУ» - Режимы работы
 Режим «Посадка» - вывод самолета на посадочный курс по кратчайшей траектории, выдерживание заданных линий курса и глиссады запрограммированного аэродрома, площадки специального назначения.
Режим «Посадка» - вывод самолета на посадочный курс по кратчайшей траектории, выдерживание заданных линий курса и глиссады запрограммированного аэродрома, площадки специального назначения.- Директорный сигнал на доворот в сторону посадочного курса, команда на снижение по глиссаде;
- Выдерживание потребного крена для доворота в сторону посадочного курса;
- Нулевое положение директорной стрелки при полете по линии ПК;
 «Крен велик» («Bank limit») - Сигнализация о предельных значениях крена и положение директорной стрелки
«Крен велик» («Bank limit») - Сигнализация о предельных значениях крена и положение директорной стрелки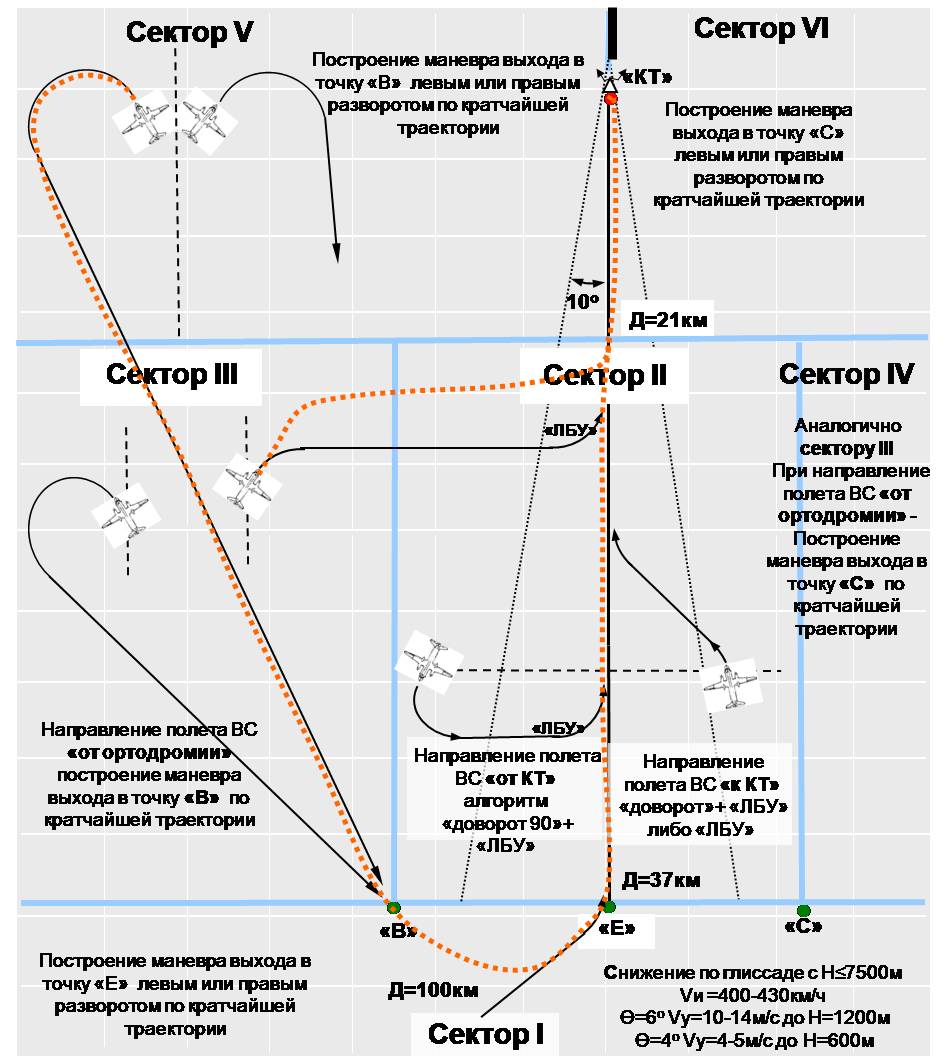 Режим "Возврат” - Автоматический выбор алгоритма для маневра в зависимости от положения ВС
Режим "Возврат” - Автоматический выбор алгоритма для маневра в зависимости от положения ВСи направления ортодромии.
- Построение траектории захода методом 6-ти секторов от этапа подхода до конечного этапа захода на посадку;
- Предварительный выход в упрежденную точку для захода на посадку с дальности 37км;
- Снижение самолета по траектории пробивания облачности (θ = 4- 6).
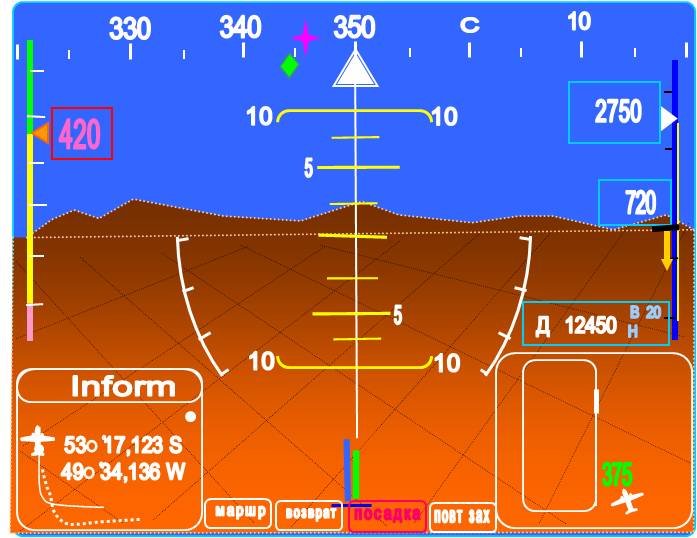
 Режим «Рельеф»
Режим «Рельеф»
- Формирование директорных команд обхода (огибания) рельефа местности по наиваыгоднейшей траектории;
- Секторно-радиальное отображение рельефа местности по курсу полета самолета;
- Отображение аварийной и предупреждающей информации.
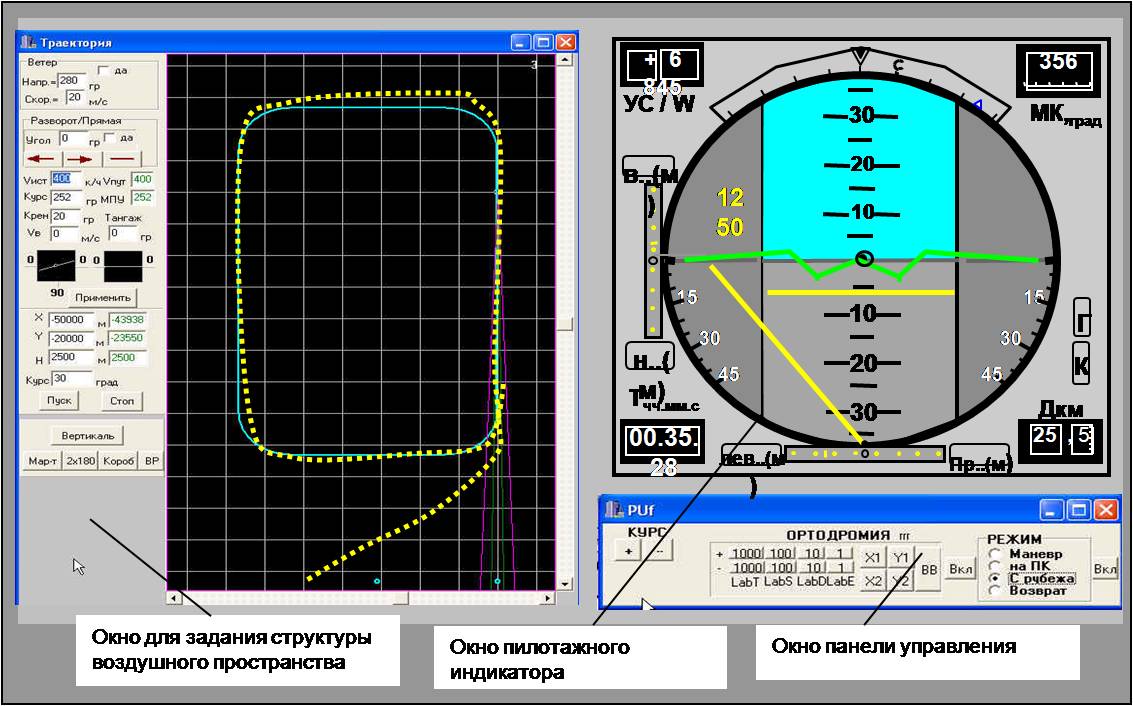
Интерфейс ИТЛ
- Получение первичных навыков методики полета по маршруту, захода на посадку и распределения внимания в директорном режиме управления при моделировании сигналов GNSS (GPS).
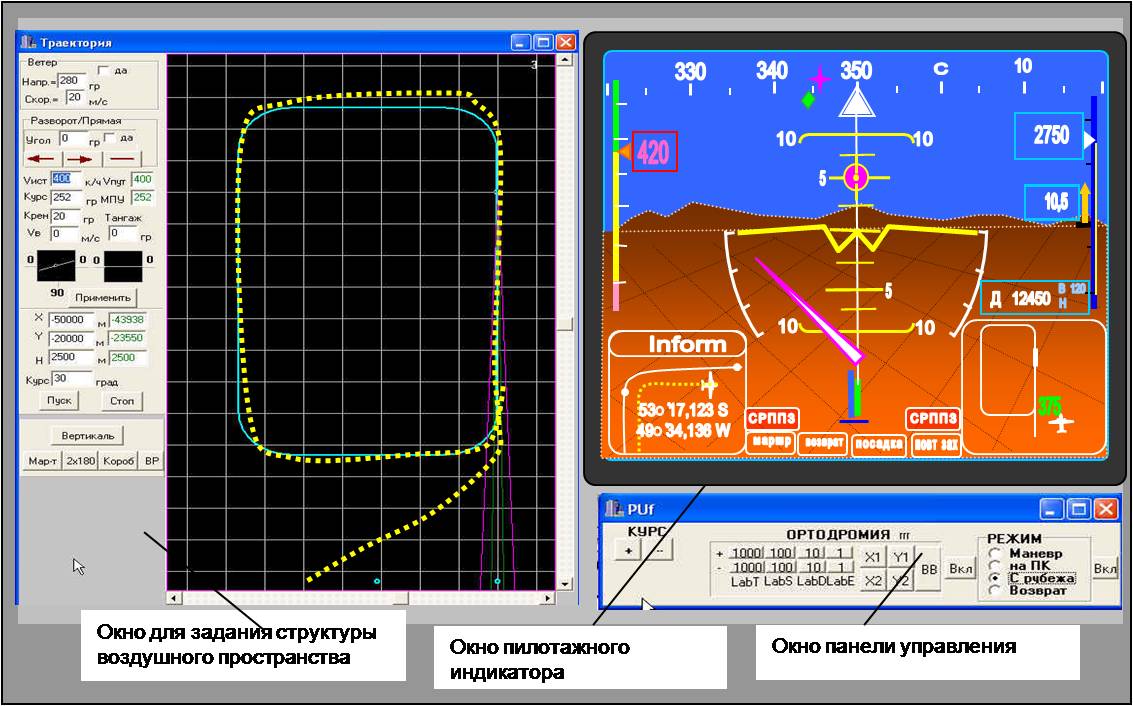
- Адаптация интерфейса ИТЛ под самолеты, оборудованные КПП