





Автоматизированный командно-диспетчерский пункт управления воздушным движением
Назначение
Автоматизированный командно-диспетчерский пункт (АКДП) управления воздушным движением «ОБЗОР-А» предназначен для обслуживания воздушных судов в зоне подхода, круга и посадки днем и ночью при условиях, соответствующих минимуму погоды, установленному рекомендациями ИКАО.
Применение современных технологий, в том числе спутниковой навигации позволяет повысить безопасность и экономичность выполнения полетов за счет применения алгоритмов автоматизации процессов УВД при выполнении предпосадочного маневра и на посадочном курсе.
Состав АКДП
Программно-алгоритмическое обеспечение позволяет организовать автоматизированные рабочие места (АРМ) для лиц группы руководства полетами (диспетчеров), специализированные по зонам ответственности и принадлежности – военные (гражданские):
- АРМ руководителя полетов (диспетчера «старта»);
- АРМ руководителя ближней зоны (диспетчера «круга»);
- АРМ руководителя зоны посадки (диспетчера «посадки»);
- АРМ руководителя дальней зоны (диспетчера «подхода»).
АРМ конфигурируются по количеству мониторов:
- двух мониторного состава – полный состав АКДП;
- одно мониторного состава – сокращенный вариант с сохранением всех функций полного состава.
Функциональные задачи АРМ
- анализ воздушной и метеорологической обстановки;
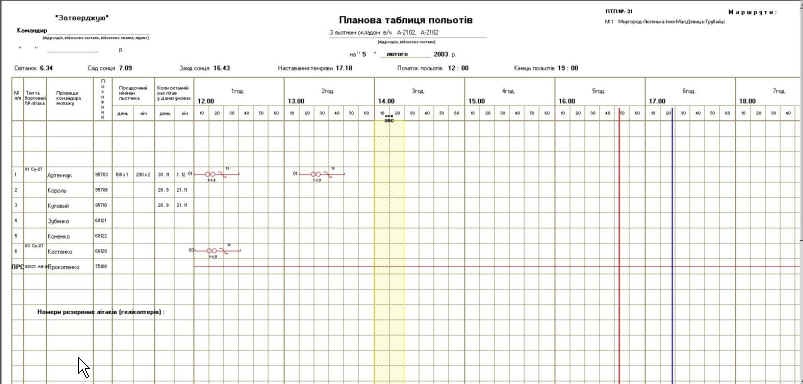
- выполнение плановой таблицы;
- управление движением самолетов в зонах ответственности;
- управление движением самолетов с отказавшим навигационно-пилотажным оборудованием;
- обеспечение мер безопасности при управлении движением самолетов в своих зонах ответственности;
- управление движением самолетов в сложной воздушной обстановке.
- отображение информации радиолокационных средств;
- отображение результатов расчетов алгоритмов автоматизации УВД;
- отображение информации радиопеленгатора;
- отображение плановой таблицы полетов;
- отображение метеорологической информации;
- отображение справочной информации;
- отображение информации системы единого времени;
- настройка рабочих мест лиц ГРП.
Перечень функций «ОБЗОР-А»
- Отображение структуры воздушного пространства в районе аэро-дрома;
- Отображение статической информации курса и глиссады;
- Изменение масштаба;
- Смещение центра отображения экрана;
- Отображение увеличенного фрагмента;
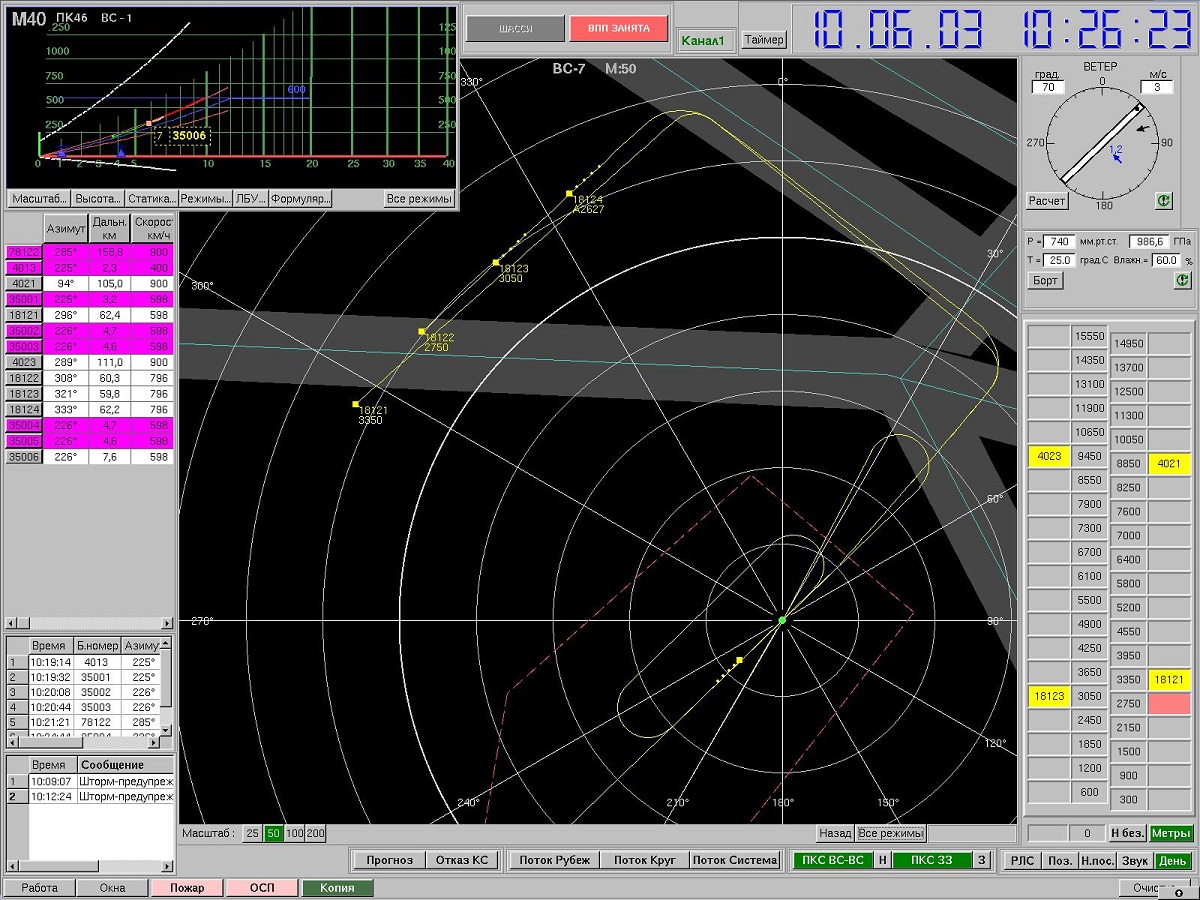
- Отображение радиолокационной информации в районе аэродрома в графическом виде с возможностью изменения вида формуляра сопровождения и индикацией особых случаев, выхода из зоны видимости локаторов, отсутствия/наличия ответчиков и индикацией индивидуального опознавания;
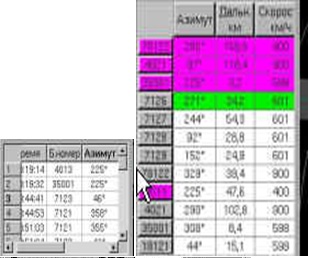
- Отображение радиолокационной информации в районе аэродрома в табличном виде с индикацией особых случаев, выхода из зоны видимости локаторов, недостоверности кодов высоты и бортового номера, отсутствия/наличия ответчиков;
- Отображение радиолокационной информации при заходе на посадку в графическом виде с индикацией отклонения от курса и глиссады;
- Отображение радиолокационной информации при заходе на посадку в табличном виде с индикацией отклонения от курса и глиссады;
- Построение непрерывного трека ВС;
- Отображение предыстории движения ВС;
- Отображение плановой таблицы полетов.
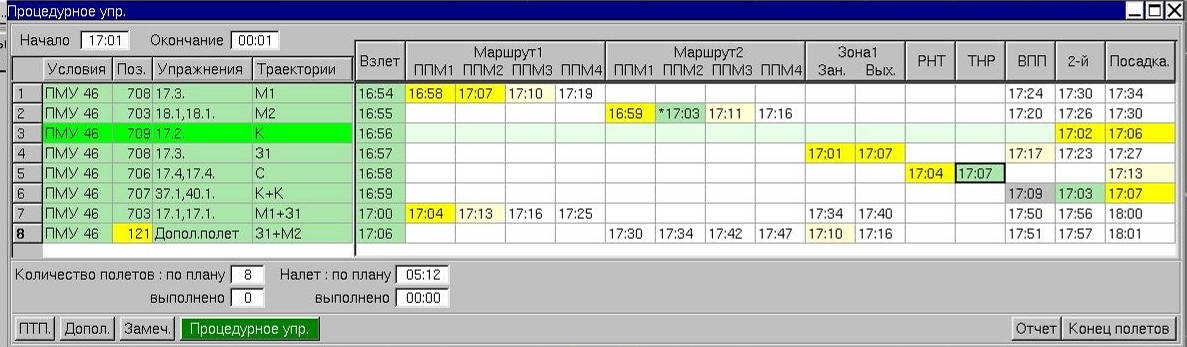
- Организация процедурного контроля за положением ВС.
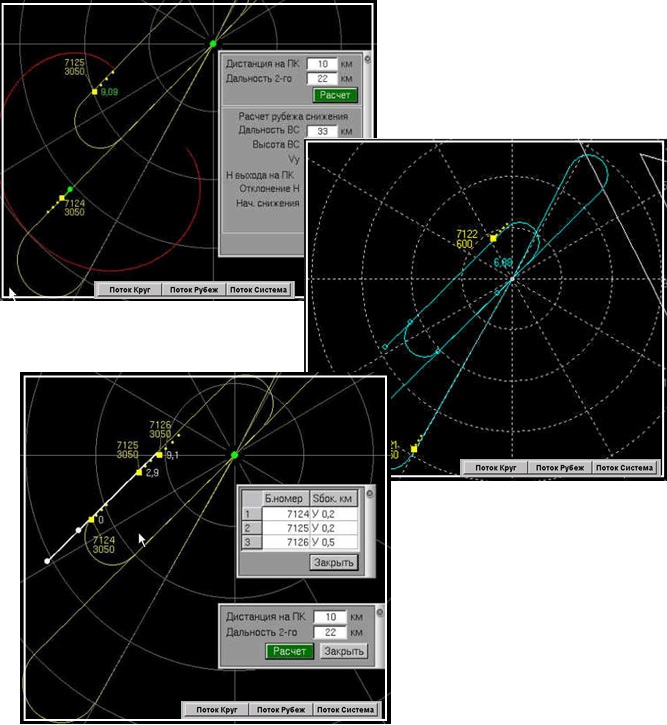
- Обеспечение установленных дистанций на посадочном курсе за счет автоматизации процессов формирования потока самолетов при заходе на посадку по кругу, по кругу и по системе “ с прямой” одновременно, по кругу и с рубежа одновременно;
- Расчет рубежа начала снижения ВС при заходе на посадку.
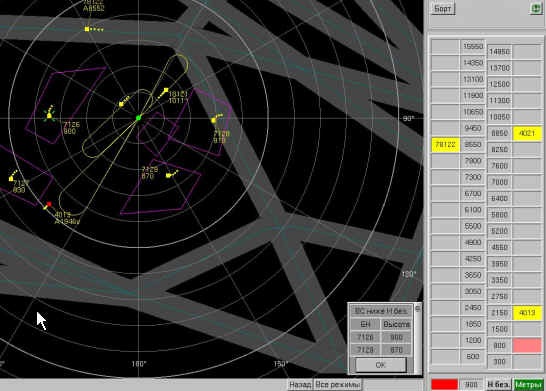
- Отображение высоты в табличном виде в полном формуляре, в формуляре сопровождения, в эшелонаторе в диапазоне от 0 до 14650м (48000ft);
- Задание безопасной высоты (Н);
- Задание области ограничения для отображения ВС в эшелонаторе;
- Сигнализация о снижении ВС ниже безопасной высоты;
- Сигнализация в случае занятости эшелона 2-мя и более ВС.
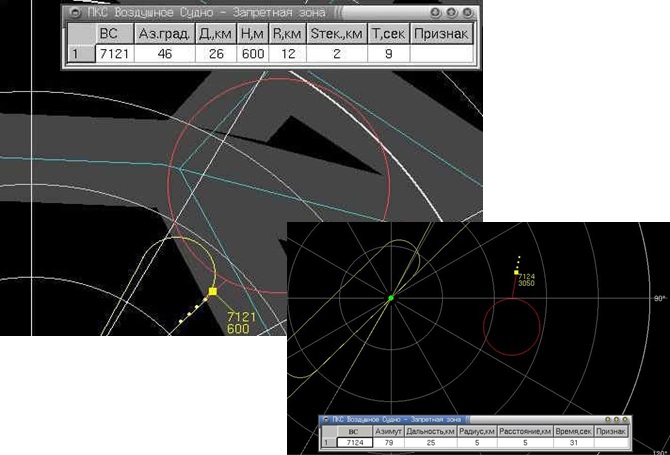
- Автоматическое обнаружение и сигнализация о потенциально кон-фликтной ситуации между ВС, между ВС и запретной зоной;
- Возможность задания зоны ограничения полетов с последующей авто-матической сигнализацией приближения к ней;
- Возможность ввода и отображения символьной информации в зоне ограничения полетов;
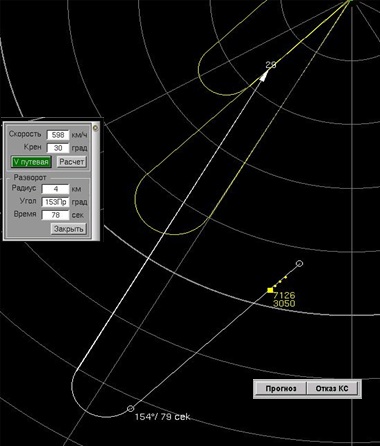
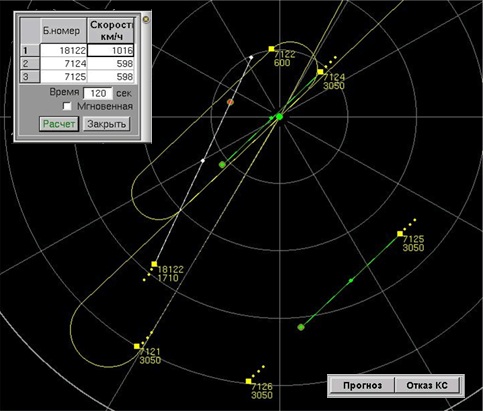
- Построение траектории и расчет времени и угла разворота при заходе на посадку ВС с отказавшей курсовой системой – алгоритм «Отказ КС»
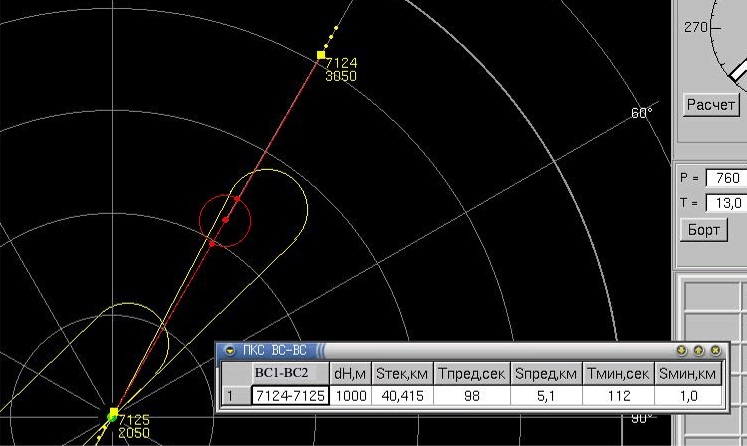
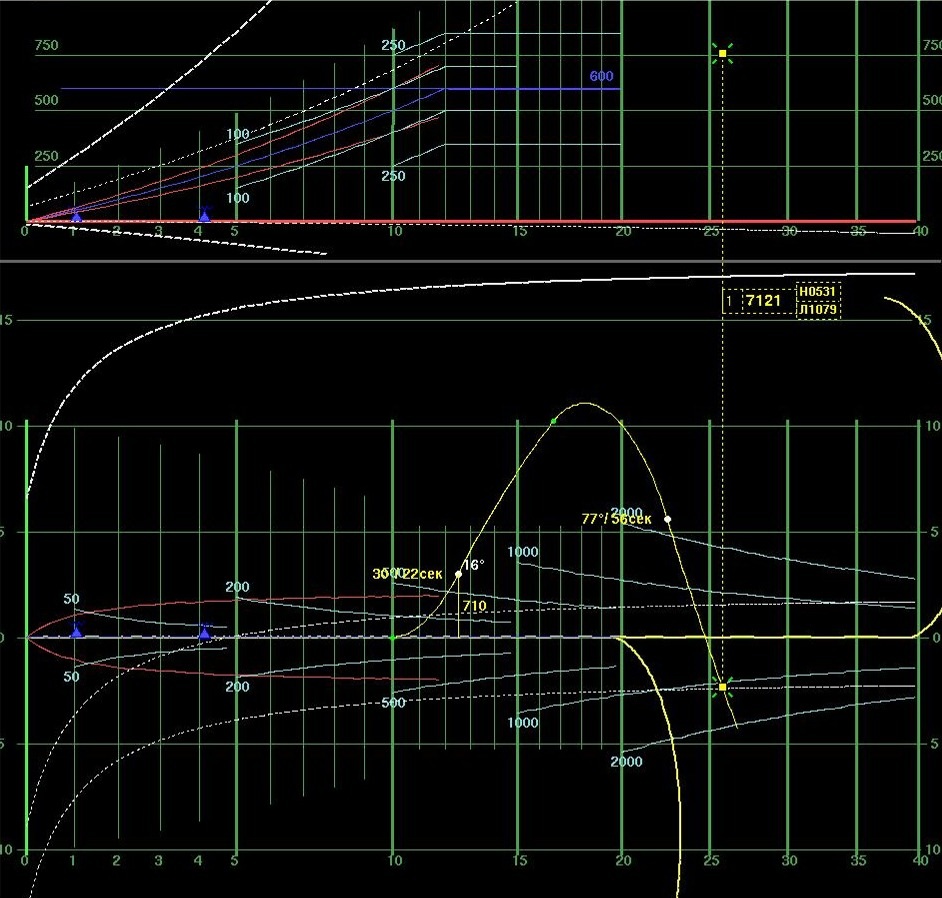
- Прогноз воздушной обстановки, расчет условий расхождения ВС и выхода на ППМ в заданное время, предварительный прогноз выхода ВС на РНТ;
- Алгоритм расчета линейно-бокового упреждения доворота на ПК - расчет точки начала разворота на посадочный курс с учетом ветра;
- Алгоритм «Опасное сближение» - предупреждение об опасном сближе-нии ВС на ПК;
- Объемное представление положения ВС относительно линии заданного курса и глиссады - Полный формуляр овального типа;

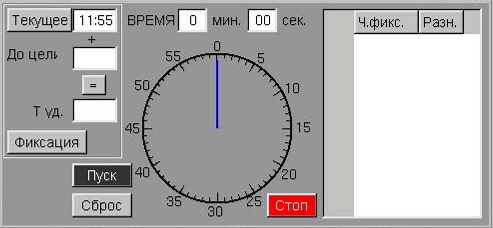
- Отображение информации системы единого времени в виде табло “дата, время”, а также таймера с секундной стрелкой:
- фиксация интервалов взлета ВС с помощью таймера;
- расчет времени удара по наземным целям;
- расчет времени взлета ВС для выхода на цель в заданное время;
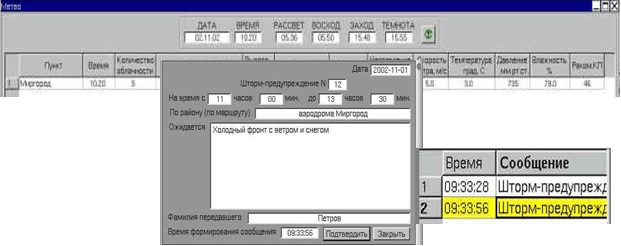
- Отображение метеорологической информации на запасных аэродромах и информации о штормовом предупреждении;
- Отображение оперативной информации о ветре у земли, расчет боковой составляющей;

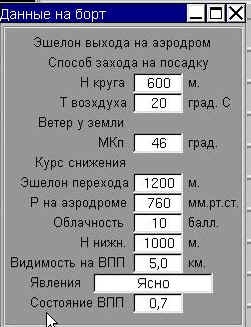
- Формирование табло данных для передачи на борт прилетающего ВС.
- Выход из зоны видимости РЛС или потеря радиолокационного сопровождения;
А также:
- Экстраполяция положения всех ВС в окне радиолокационной информации по времени;
- Задание источника отображения радиолокационной информации;
- Экстраполяция положения ВС при потере радиолокационного сопровождения;
- Ввод позывного лётчика в формуляр сопровождения;
- Отображение линии пеленга и курса полета на аэродром посадки («прибоя»);
- Отображение сигнальной информации о занятости ВПП, выпуске шасси;
- Определение расстояния между выбранными точками воздушного пространства;
- Определение дистанции между ВС в реальном времени;
- Определение координат выбранной точки воздушного пространства;
- Перемещение формуляров сопровождения ВС;
- Оперативный вызов справки при особых случаях с дефицитом времени;
- Звуковое сопровождение особого случая в полёте;
- Отображение информационно-справочной информации;
- Отображение архивной информации.
Результаты исследования эффективности управления воздушным движением в районе аэродрома с применением алгоритмов автоматизации
По решению Главного штаба ВВС МО Украины Харьковским институтом ВВС было проведено исследование эффективности управления воздушным движением в районе аэродрома в рамках научно-исследовательской работы. Результаты исследований легли в основу разработки технологии управления воздушным движением Руководителя полетов, Руководителя ближней зоны, Руководителя зоны посадки с использованием ал-горитмов и режимов автоматизированных рабочих мест группы руководства полетов АКДП “Обзор -А”.
Результаты исследований процессов управления полетами с применением алго-ритмов автоматизации показали, что:
- применение алгоритмов «Поток-Рубеж», «Поток-Круг», «Поток-Система» при формировании потока самолетов, заходящих на посадку с разными скоростями, обеспе-чивает интервал Дпк±1080 м с вероятностью 0.85 и исключает уход на второй круг. Без применения указанных алгоритмов данный интервал может быть получен в пределах от 3.5 до 16.5 км (±6500м). Таким образом, расход топлива для захода на по-садку без применения алгоритмов увеличивается от 3% до 22% при средних значениях отклонений дальности второго разворота от заданного и при экстремуме Дпк соответ-ственно. При стремлении Руководителя полетов обеспечить заданную дистанцию меж-ду самолетами на ПК возникает вероятность ухода на второй круг, что дополнительно увеличивает расход топлива на полет по кругу.
- применение алгоритма «Отказ курсовой системы» позволяет значительно увели-чить точность выхода самолета на заданный курс. Так, при средней ошибке глазомерно-го определения курса ВС 10о и угла разворота 14 о имеются экстремумы, приводящие к потере точности конечного результата от -38о до 11о. Применение алгоритма позво-лило получить среднее отклонение от заданного курса 0.75о при экстремуме 5о. Таким образом, применение алгоритма снижает нагрузку лиц ГРП примерно в 2 раза, исключая сложности глазомерного определения углов и выполнения расчетов.
- применение алгоритма «Прогноз» позволяет получить данные о положении ВС и расстоянии между ними через заданное время, сравнить его с нормами эшелонирования и, при необходимости, принять решение на расхождение ВС. Автоматизация функции позволяет выполнить расчеты по выходу ВС на поворотный пункт маршрута (ППМ) в заданное время, осуществить прогноз при изменении установленной скорости, выпол-нить прогноз обстановки в районе аэродрома при выходе нескольких ВС на радионавига-ционную точку (РНТ). При сближении самолетов на ПК алгоритм позволяет определить дистанцию между ВС на момент посадки впереди летящего.
- при управлении в зоне посадки:
- применение алгоритма «ЛБУ» - расчет линейно-бокового упреждения доворота на ПК с учетом ветра - практически исключает трудоемкий процесс глазомерного определения положения ВС и расчета точки начала разворота на посадочный курс,
- алгоритм «Опасное сближение» сигнализирует о сближении ВС на ПК, менее установ-ленного, позволяет выполнить расчеты на изменение скорости ВС.
5. алгоритмы предупреждения потенциально конфликтных ситуаций постоянно анализируют воздушную обстановку и автоматически, независимо от лиц ГРП, выдают сообщение:
- «опасное сближение ВС»,
- «приближение к запретной зоне »
- снижение ВС ниже безопасной высоты (установленной),
что позволяет заранее выявить конфликт и снижает влияние человеческого фактора на безопасность полетов.